
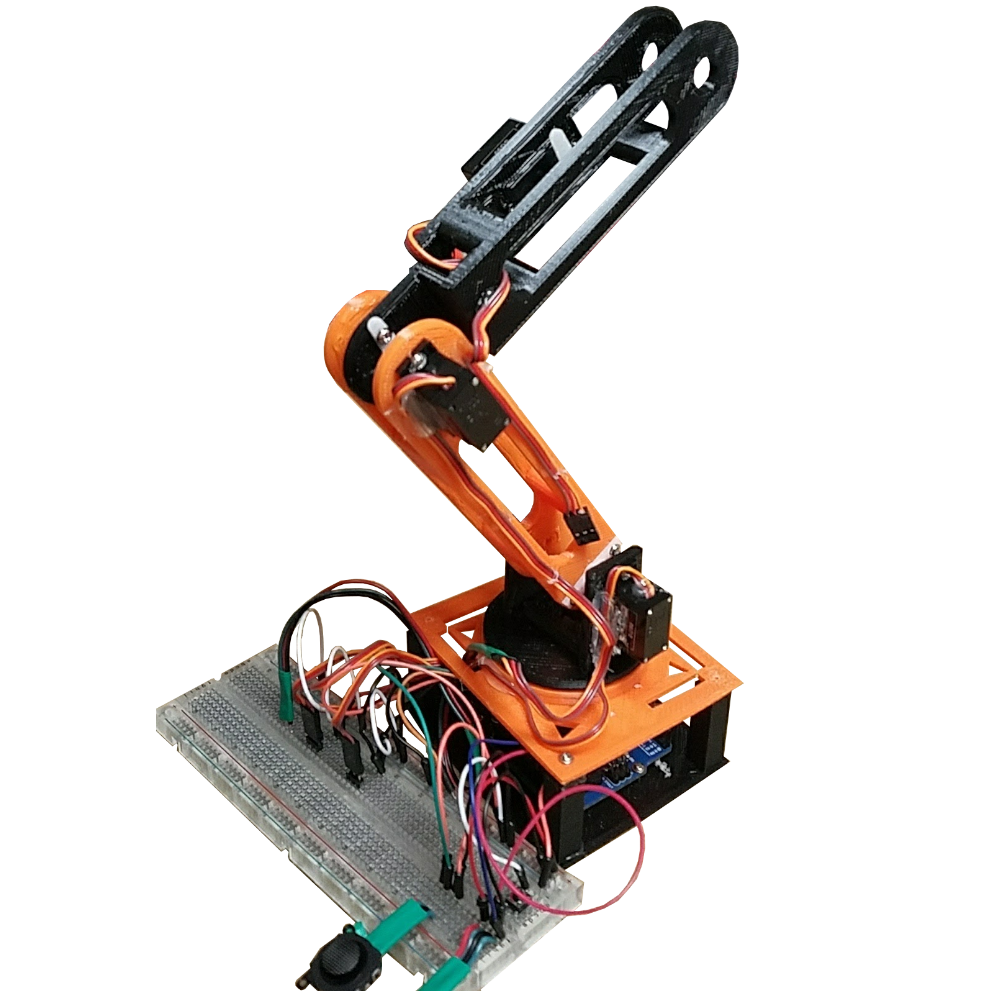
Robot Arm V1
Robot Arm V2 [WIP]
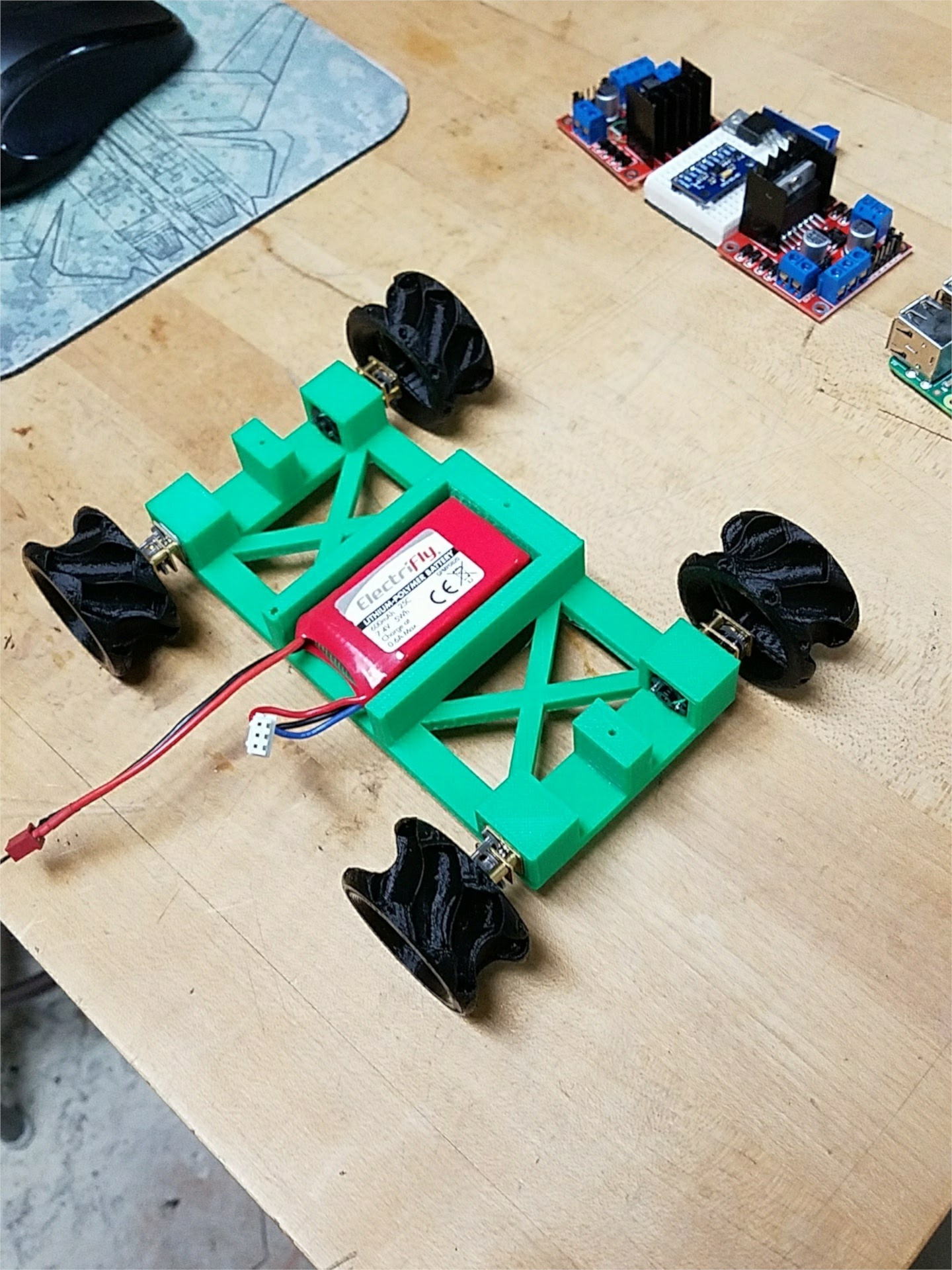
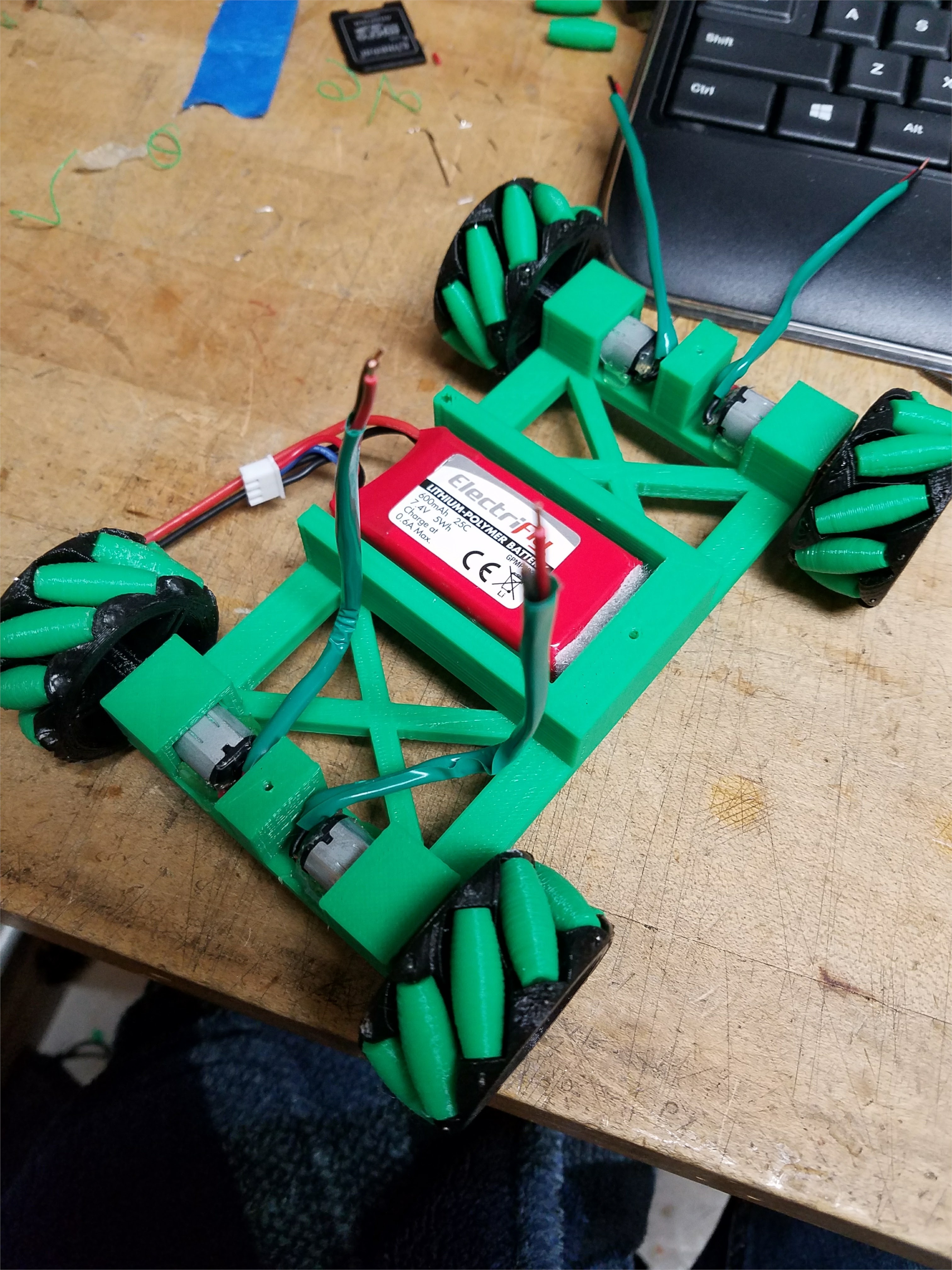
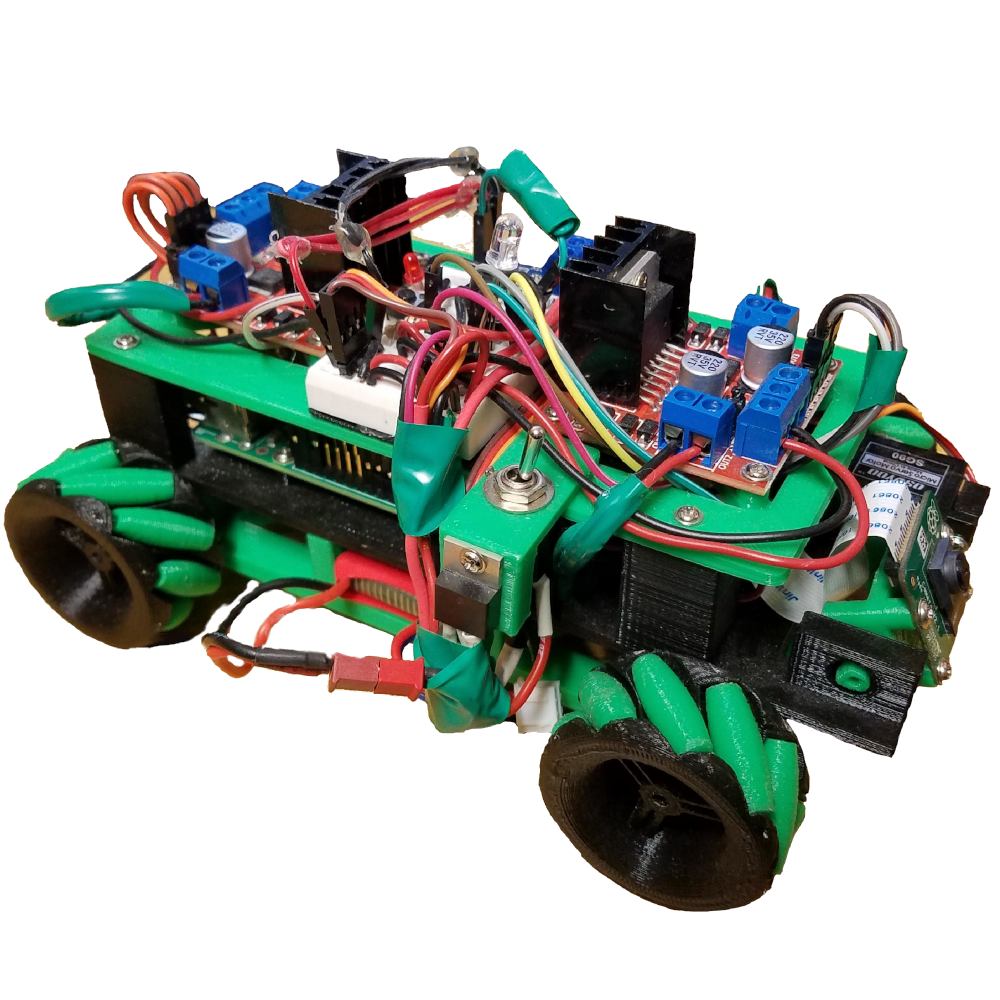
MiniMcGee is the name of my very first remote control project. It was meant to be a test of my technical skill, as well as a hobby project.
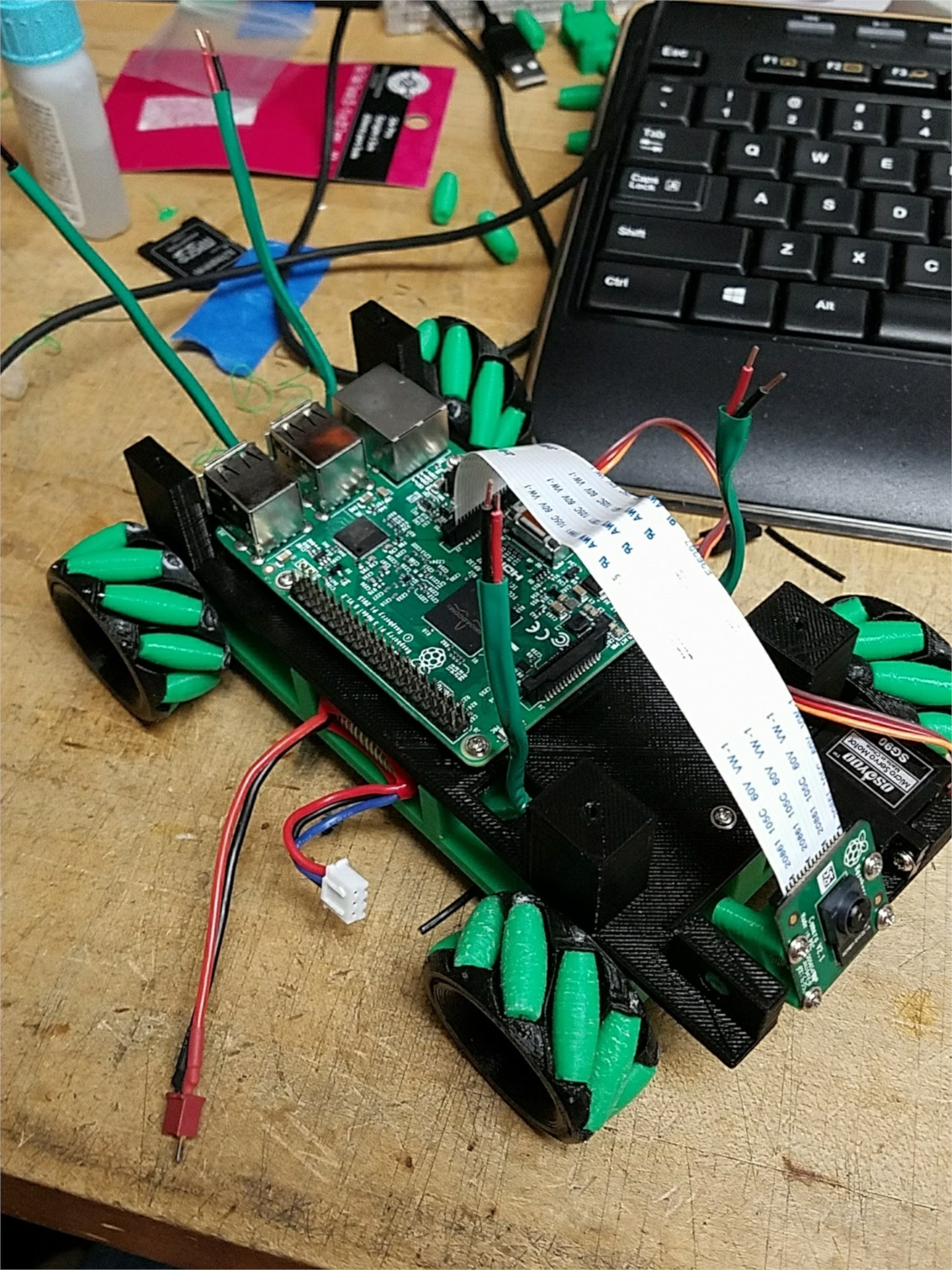
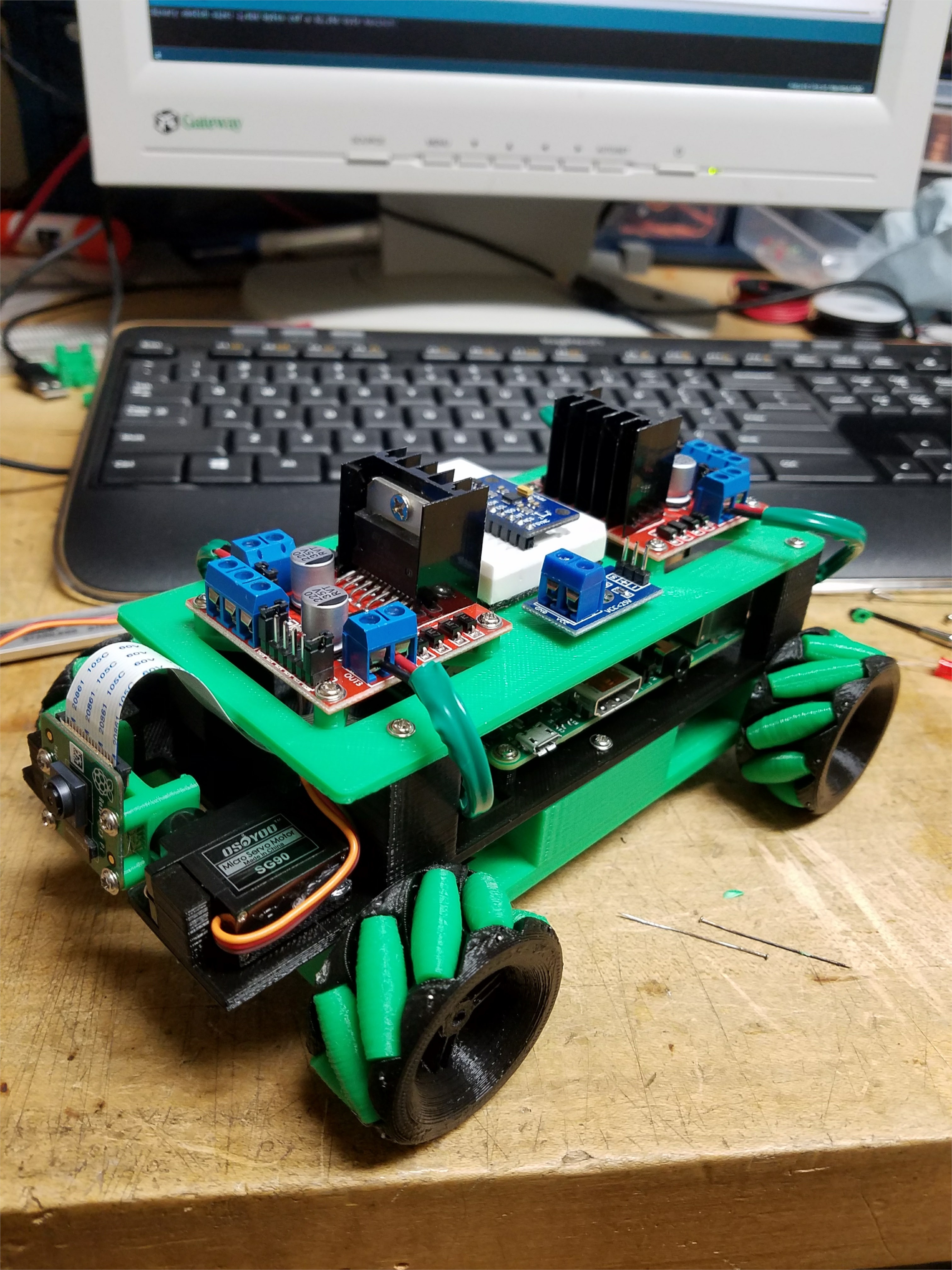
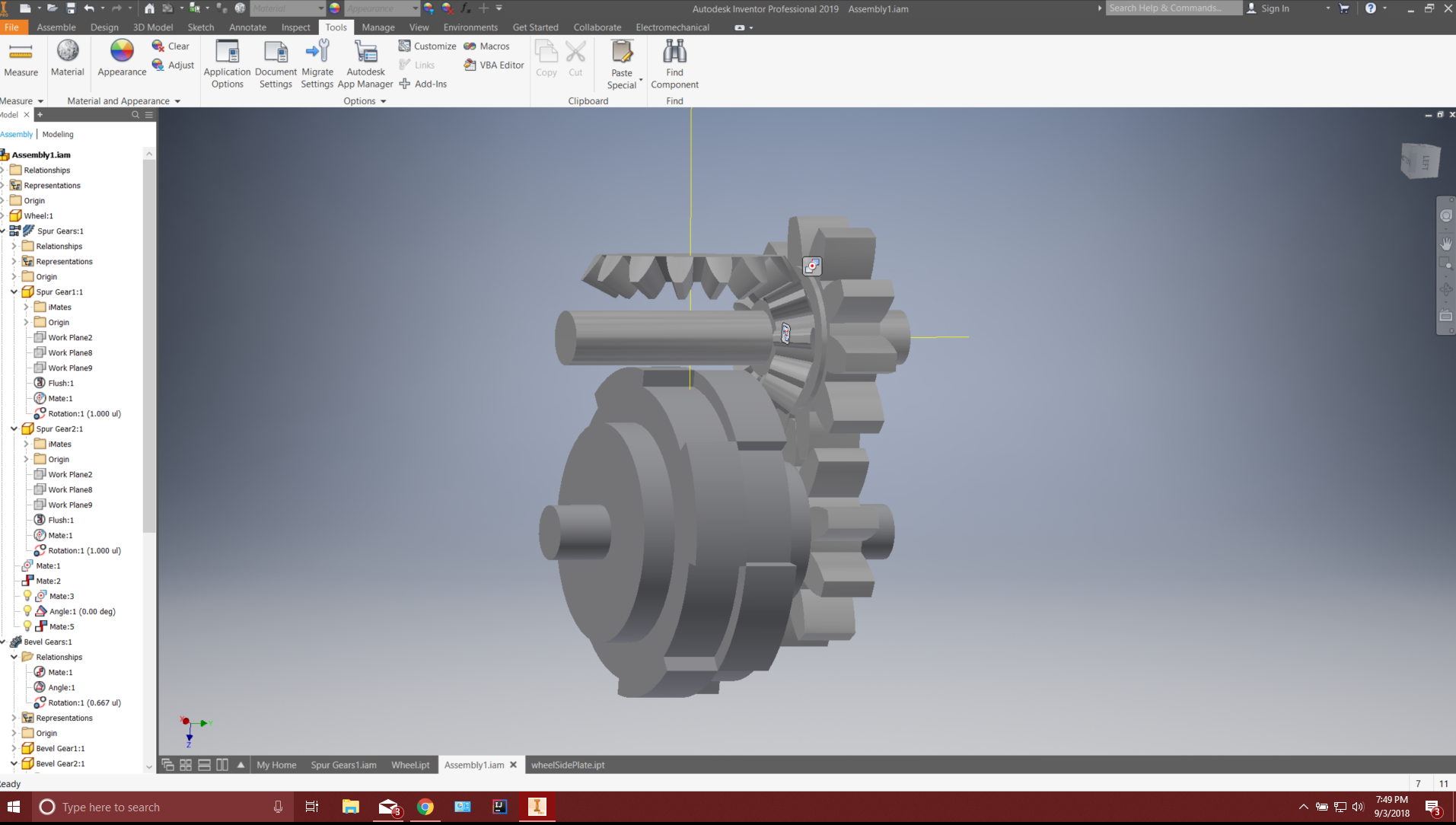
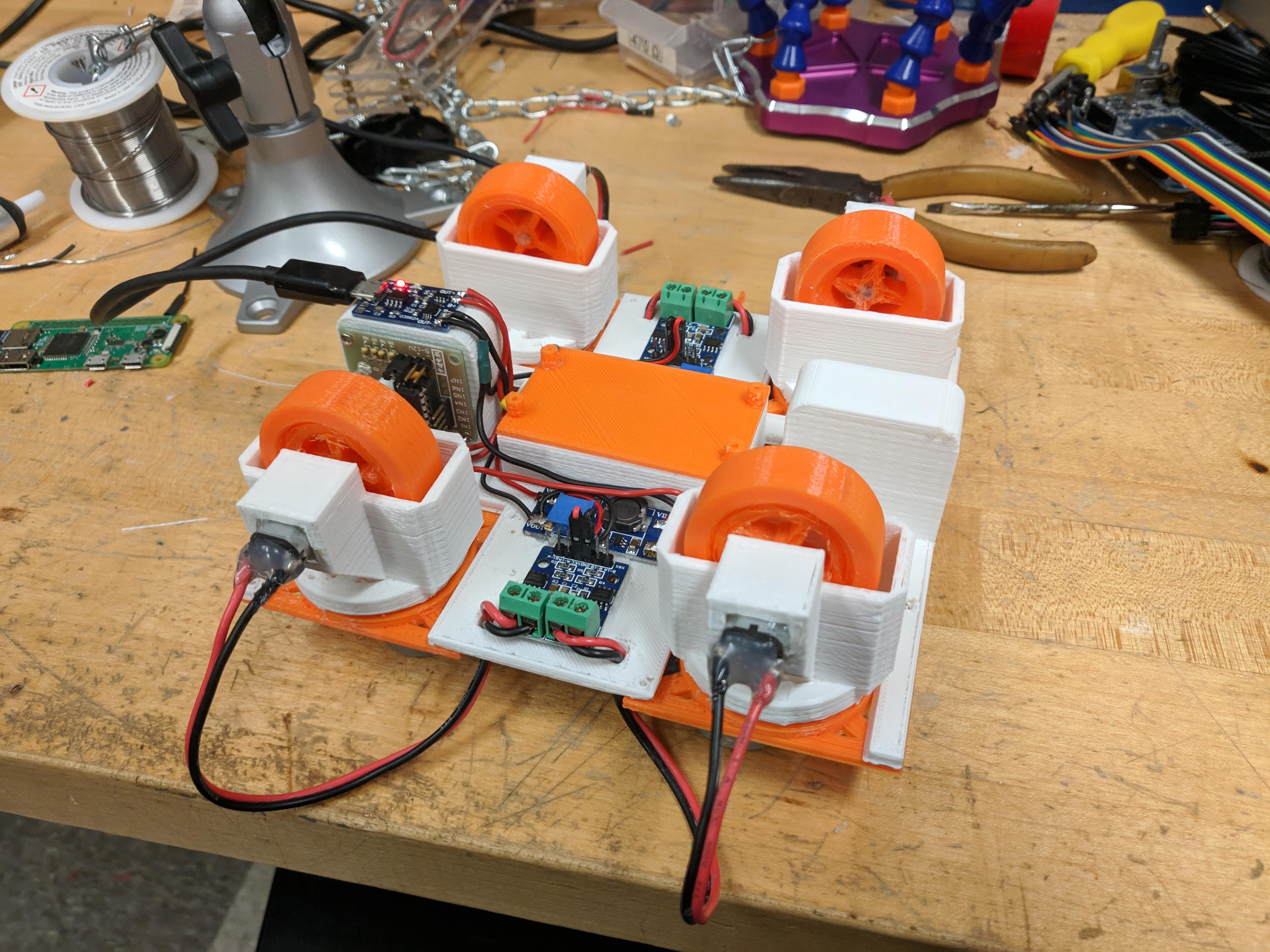
The first step to making this was planning: Since I already had experience in 3d CAD and printing, wiring and programming, I decided I wanted this bot to do something that would challenge my skills. Therefore, I researched and found a 3D model for mecanum wheels, a type of drivetrain that allows the robot to not only move forwards and backwards, but laterally as well. I ended up designing the CAD for the chassis in Autodesk Inventor around the model for the wheels. In order to fit all the electronic components, I needed to use a layered approach, making the first layer for the battery and motors, the second for the Pi and servo, and the third for the motor controllers and BMS.
This project can be used as a test bed in the future for software development, such as vision tracking and following programs using the camera, and is useful for community outreach. It has already seen two community STEM events, and helps inspire elementary students to pursue STEM careers.
Github Gallery CAD ModelThe second robot I've built, taking what I learned from version 1 and improving on it, with some minor differences.
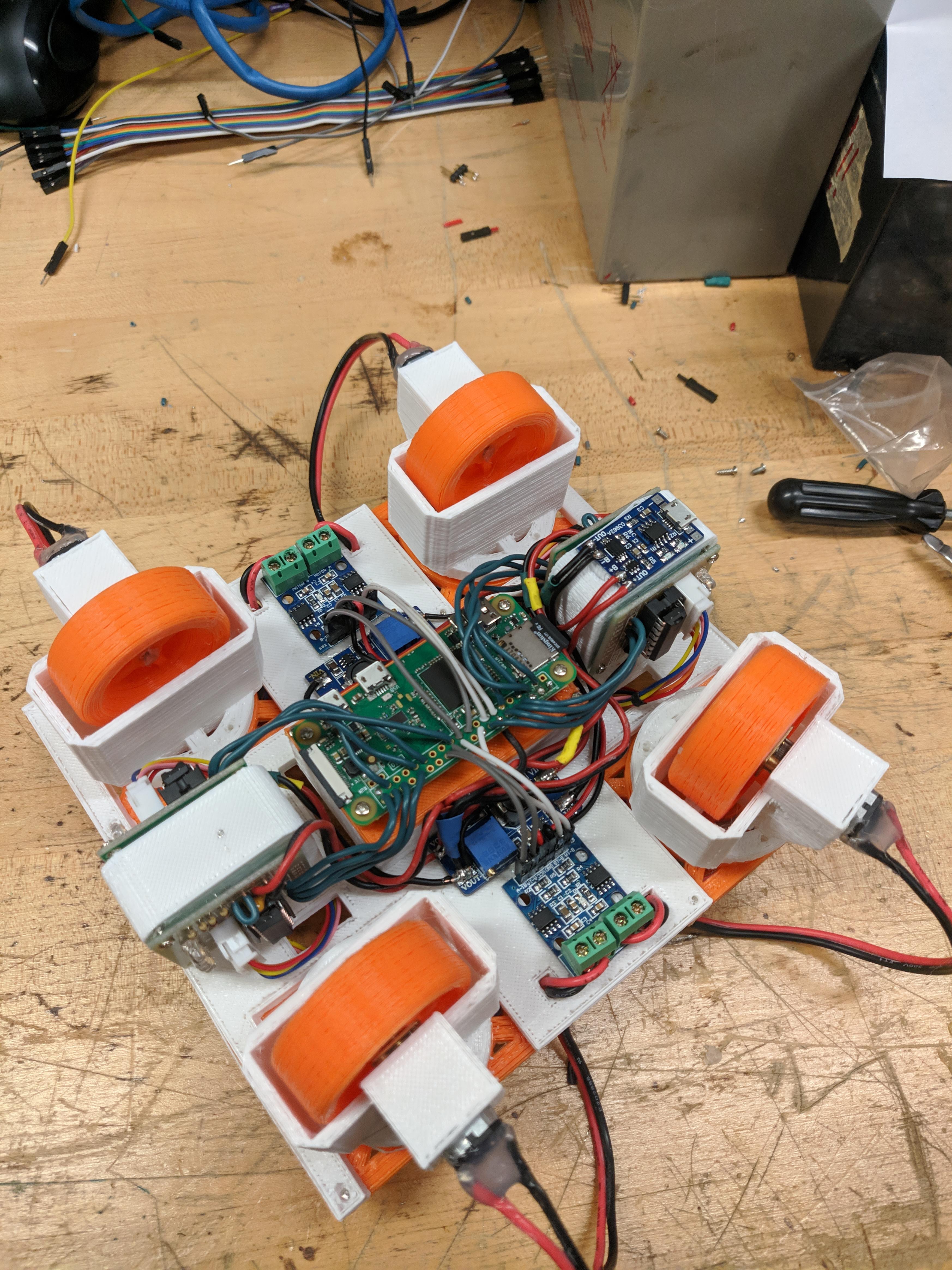
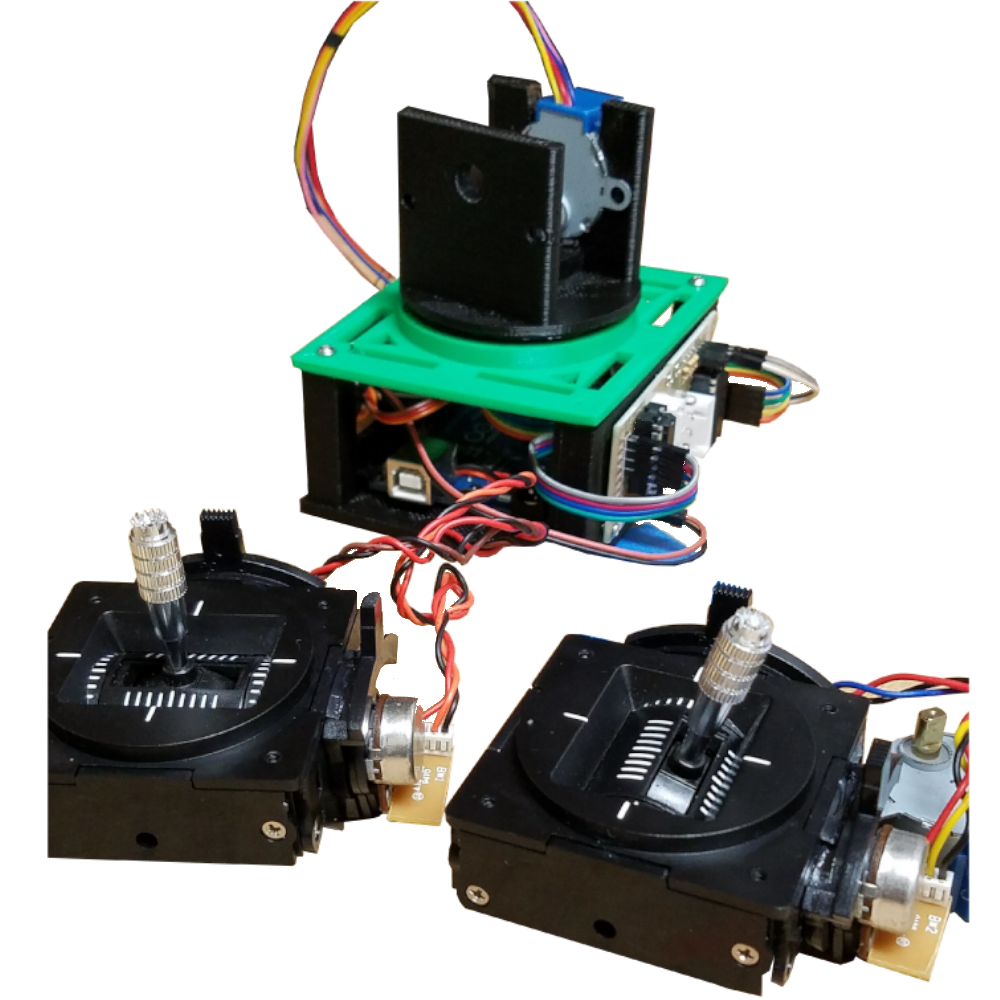
The next iteration of the MiniMcGee robot series, version 2 changes the driving subsystem to use a "swerve" style drive. This means that each wheel has it's own direction control, allowing the robot to move in all directions, just like mecanum. However, this drive system is much faster, and in theory is more powerful and maneuverable.
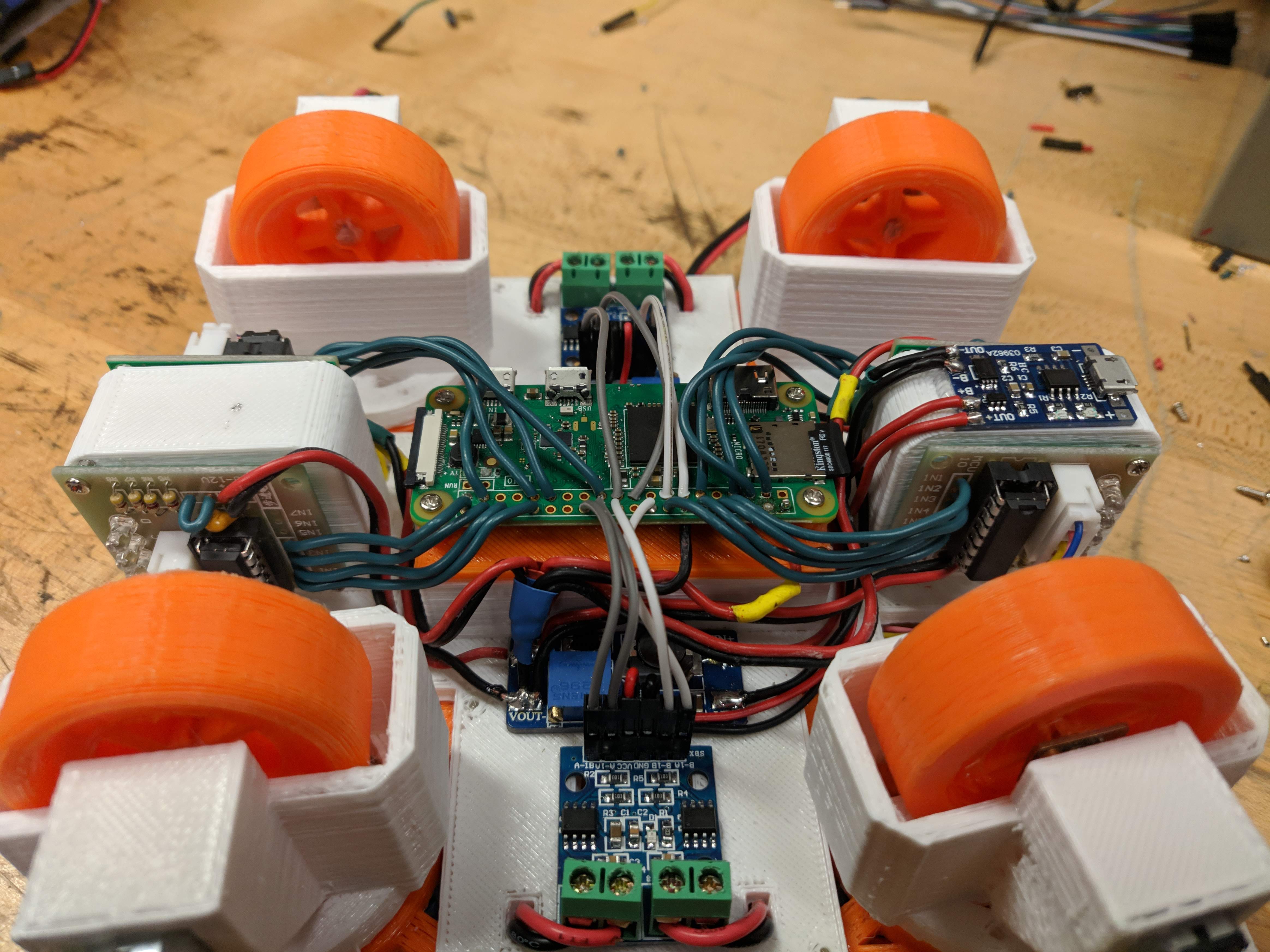
The working product is revision 2.1, but 2.0 never left the prototyping stage. 2.0 was envisioned being a full swerve sytem, allowing 360 degree movement on the direction motors, but the gearing proved to be too difficult to 3D print, and so 2.1 was created as a partial swerve, which still allowed about 120 degrees of rotation in each direction, but is much less maneuverable and proves a less capable testing plaform for code.
While revision 2.1 is functional and a working proof of concept, I intend to move forward in revision 2.2, which should allow a true swerve drive. The stepper motors used for direction proved to be too weak and lose their "home" position too fast, so a brushed sensored solution is in the works.
Github Gallery CAD Model